Publications
2026

2025
2024
-
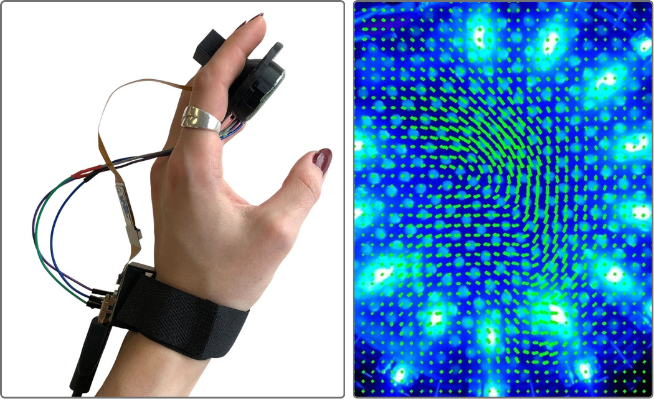
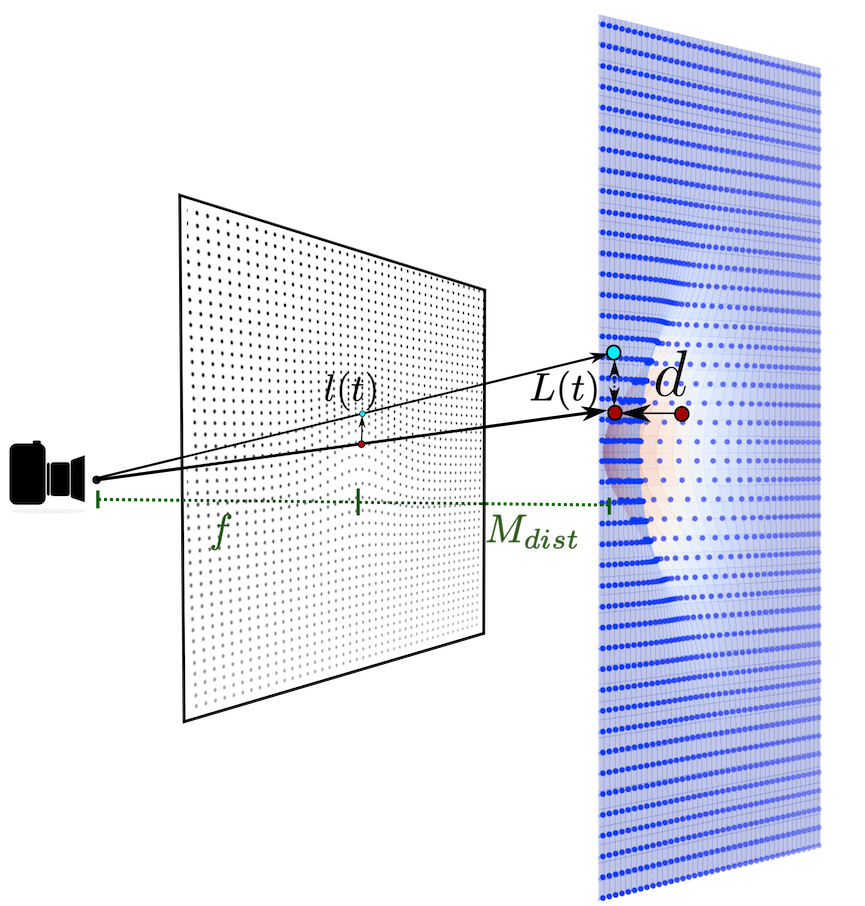 Visual-Tactile Inference of 2.5 D Object Shape From Marker TextureIEEE Robotics and Automation Letters (RA-L), 2024
Visual-Tactile Inference of 2.5 D Object Shape From Marker TextureIEEE Robotics and Automation Letters (RA-L), 2024
2023
2022
-
 A Study of Human-Robot Handover through Human-Human Object TransferNeural Information Processing Systems (NeurIPS), Human in the Loop Learning (HiLL) Workshop, 2022
A Study of Human-Robot Handover through Human-Human Object TransferNeural Information Processing Systems (NeurIPS), Human in the Loop Learning (HiLL) Workshop, 2022