Abstract
Neural Information Processing Systems (NeurIPS), Human in the Loop Learning (HiLL) Workshop 2022.
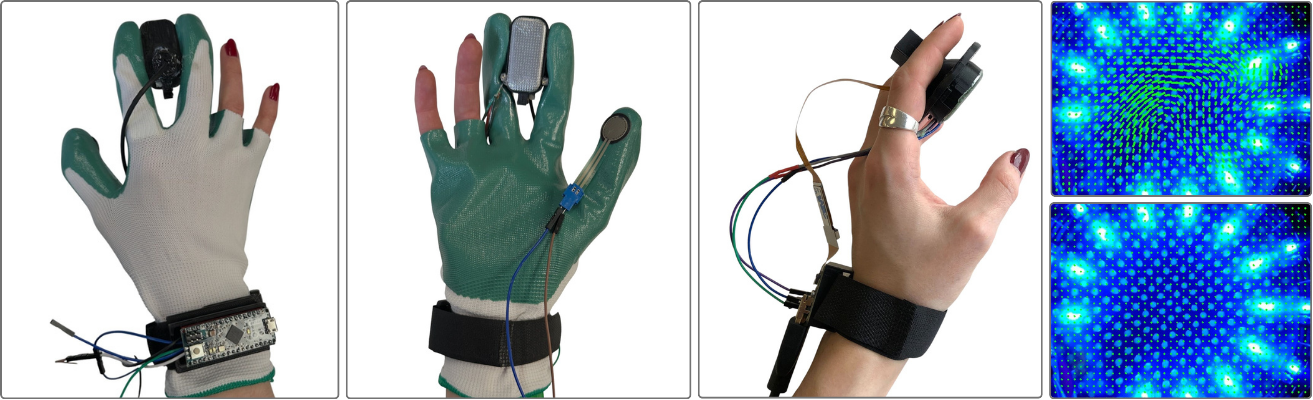
This research is among the first empirical studies to examine how humans adapt their handover behaviour when transferring hazardous versus safe objects. Using a high-resolution visual-tactile sensor, the See-Through-your-Skin (STS) sensor, in controlled human-human handover trials, we characterize how people modulate timing and contact forces during different handover phases, such as “negotiation”, when both partners are in contact with the object. Our analysis reveals clear risk-dependent differences in release strategies and tactile interaction patterns, highlighting previously uncharacterized safety behaviours that humans use to manage uncertainty. These findings provide concrete tactile and temporal features for designing robot policies to enable safer, more anticipatory handover in human-robot interaction, as well as a methodology for studying human-human handover using a handheld tactile device. This work was conducted at the Samsung AI Center in Montréal.