Abstract
IEEE Robotics and Automation Letters (RA-L), presented at ICRA 2025.
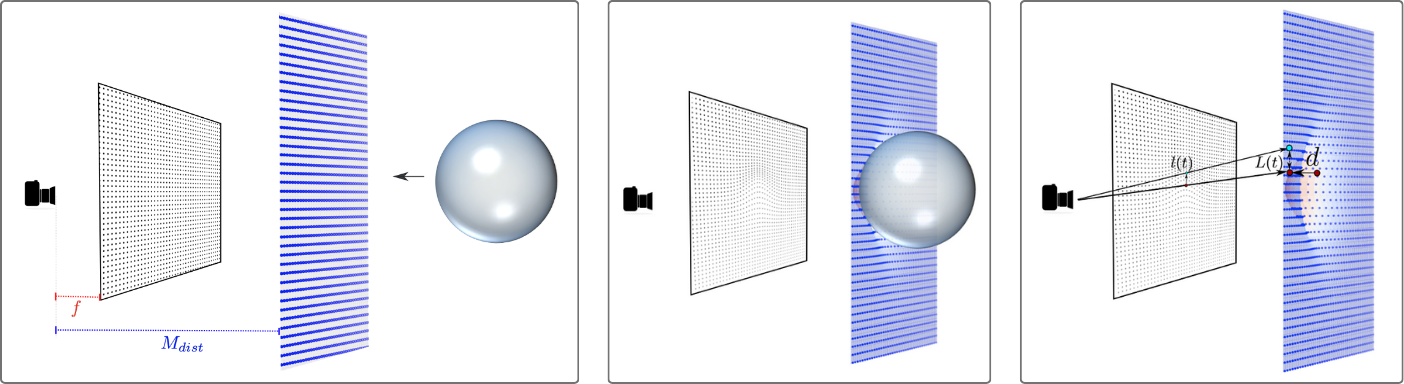
This work introduces a method to recover object contact shape using visual-tactile sensors with marker patterns. Unlike prior approaches that need specific sensor embodiments and controlled lighting, our method relies only on changes in marker separation during contact. This enables real-time shape estimation for a wide range of existing sensors without requiring retraining or specific hardware and lighting conditions. This extends the capacity of tactile sensor that previously could not recover shape such as sensors with semi-transparent membranes or those not equipped with specific hardware. Our results show that our approach to surface contact shape recovery is consistent, qualitatively and quantitatively, with results obtained with photometric stereo, the current state of the art approach for shape recovery in visual-tactile sensors. This work was conducted at Samsung AI Center in Montréal.